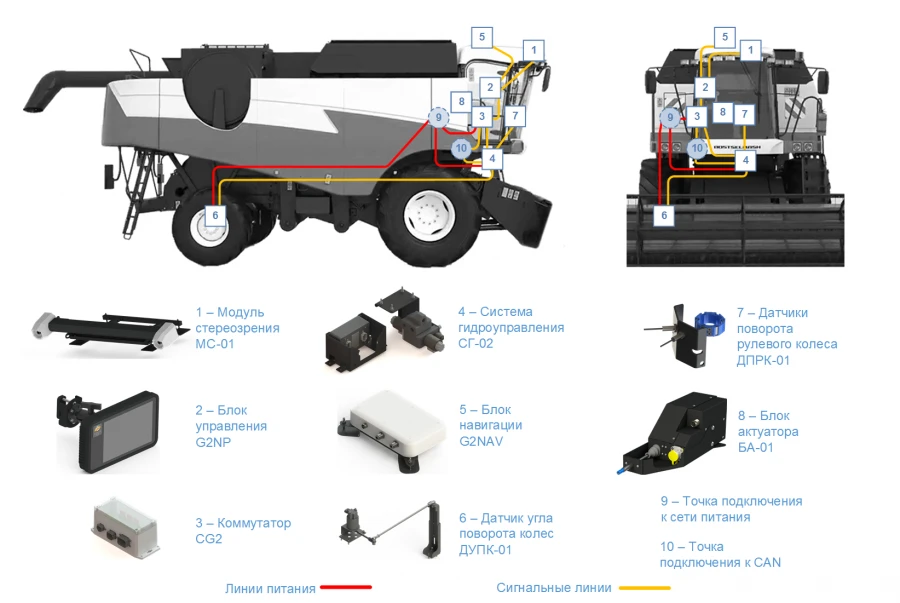
The system is designed to implement the function of auto-driving on combine harvesters when performing field harvesting operations. The principle of operation of the system is based on the use of vision technology with the use of neural segmentation and detection networks.
The control unit receives information from the stereo vision module, navigation module, wheel angle sensor, steering wheel rotation sensor, as well as information about the current speed of the combine harvester from the CAN-bus. Based on the video image, neural networks build a digital model in which they determine the objects of the real world.
The software system combines the model with sensor data in real time and issues steering and speed control commands. Thruster commands are sent to the hydraulic block control unit, which controls the hydraulic block.
The hydraulic unit is connected to the standard metering pump, which performs wheel turning. The system realises the function of data transmission via GSM communication channel.


















Tell us what you need and get quotes from verified suppliers