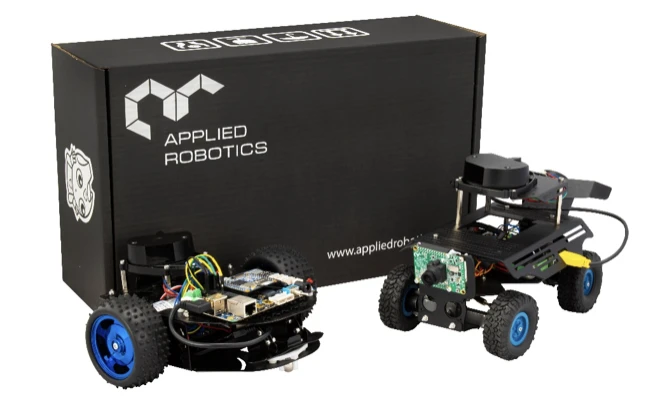










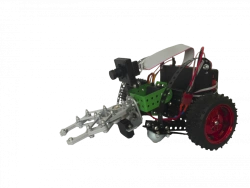
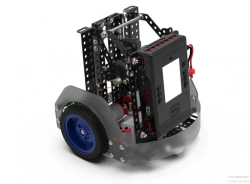
Ուսումնական համալիրն ավտոնոմ շարժական ռոբոտների ուսումնասիրության համար ներկայացնում է շարժական ռոբոտների մոդելների մշակման հավաքածու տարբեր կինեմատիկայով՝ երկколեսային շասի՝ դիֆերենցիալ կինեմատիկայով, ավտոմոբիլային տեսակի ղեկային կինեմատիկայով շասի, չորսколեսային բազմակողմանի շարժման շասի։
Համալիրի կազմի մեջ մտնում են տեղեկատվական համակարգեր և սարքեր շարժական ռոբոտի կառավարման համակարգի մշակման համար՝ ծրագրավորվող վերահսկիչ՝ ինտեգրված միկրոկոմպյուտերով, տեխնիկական տեսողության մոդուլ, ստերեո տեսողության մոդուլ, լազերային սկանավորող հեռահարաչափ, իներտիալ համակարգ, ներսում նավարկելու ծրագրային ապահովում։
Շարժական ռոբոտի կառավարման համակարգը թույլ է տալիս իրականացնել շրջապատի վերլուծություն շարժման գործընթացում, ռոբոտի շուրջ տեղի ունեցող տեղանքի քարտեզի ձևավորում և շրջապատող տարածության գլոբալ քարտեզի կառուցում։













Tell us what you need and get quotes from verified suppliers