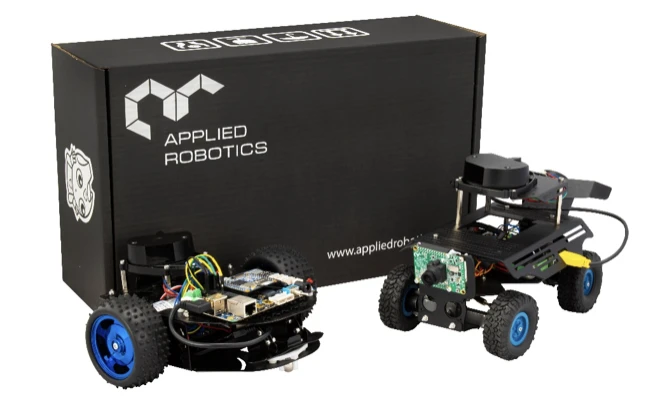










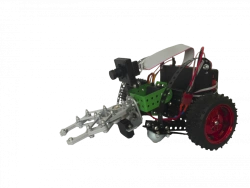
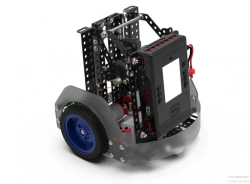
Mustaqil mobil robotlarni o'rganish uchun o'quv to'plami turli kinematika bilan mobil robotlar modellari ishlab chiqish uchun to'plamni tashkil etadi – differential kinematikaga ega ikki g'ildirakli shassi, avtomobil turidagi boshqaruv kinematikasiga ega shassi, to'rt g'ildirakli harakatning barcha yo'nalishlariga ega shassi.
To'plamga mobil robotni boshqarish tizimini ishlab chiqish uchun axborot tizimlari va qurilmalar kiradi – integratsiyalangan mikrokompyuteri bo'lgan dasturlashtiriladigan nazoratchi, texnik ko'rish moduli, stereoko'rish moduli, lazerli skanerlash masofasi o'lchagichi, inertial tizim, ichki joylashuv uchun dasturiy ta'minot.
Mobil robotni boshqarish tizimi mobil robot harakati jarayonida atrof-muhitni tahlil qilish, robot atrofidagi mahalliy vaziyat xaritasini shakllantirish va atrofdagi makonning global xaritasini tuzish imkonini beradi.













Tell us what you need and get quotes from verified suppliers