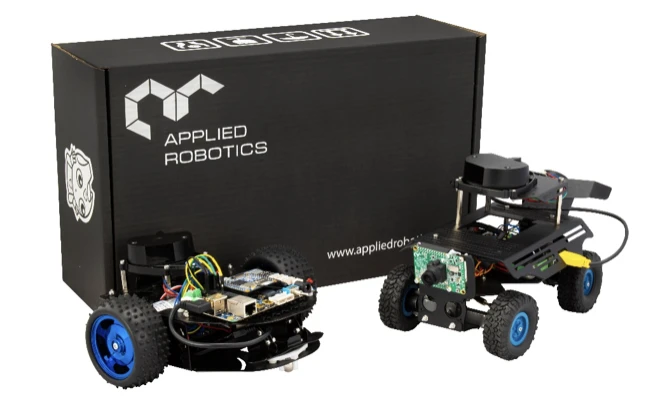










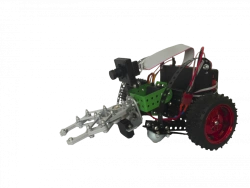
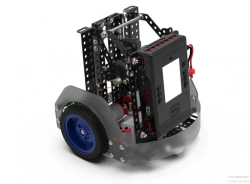
Müstəqil mobil robotları öyrənmək üçün tədris komplekti müxtəlif kinematika ilə mobil robot modellərinin inkişafı üçün dəstdir - diferensial kinematika ilə iki təkərli şassi, avtomobil tipli sükan kinematikası ilə şassi, dörd təkərli çox istiqamətli hərəkət şassisi.
Dəst informasiya sistemləri və mobil robotun idarəetmə sisteminin inkişafı üçün cihazları əhatə edir - inteqrasiya olunmuş mikrokompüter ilə proqramlaşdırıla bilən kontroller, texniki görmə modulu, stereovizion modulu, lazer skanerlə məsafə ölçən, inersial sistem, daxili məkan üçün naviqasiya proqram təminatı.
Mobil robotun idarəetmə sistemi mobil robotun hərəkət prosesində ətraf mühitin analizini, robotun ətrafında lokal vəziyyət xəritəsinin formalaşmasını və ətraf mühitin qlobal xəritəsinin qurulmasını təmin edir.













Tell us what you need and get quotes from verified suppliers