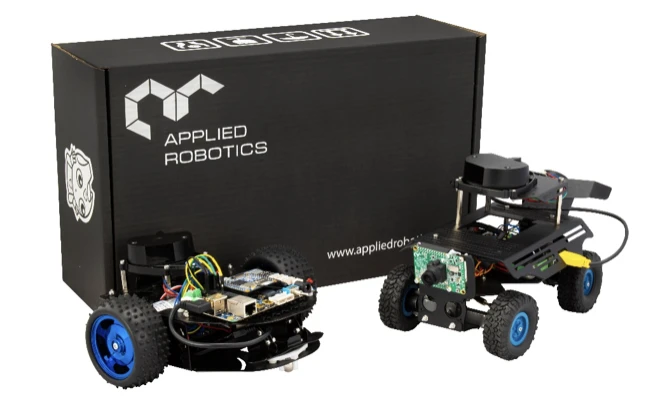










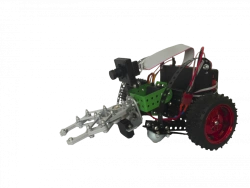
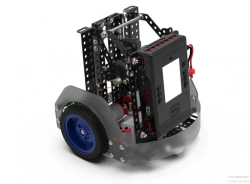
Учебный комплект для изучения автономных мобильных роботов представляет собой набор для разработки моделей мобильных роботов с различной кинематикой – двухколесное шасси с дифференциальной кинематикой, шасси с рулевой кинематикой автомобильного типа, четырехколесное шасси всенаправленного движения.
В состав комплекта входят информационные системы и устройства для разработки системы управления мобильного робота – программируемый контроллер с интегрированным микрокомпьютером, модуль технического зрения, модуль стереозрения, лазерный сканирующий дальномер, инерциальная система, программное обеспечение для навигации внутри помещений.
Система управления мобильного робота позволяет осуществлять анализ окружающей обстановки в процессе движения мобильного робота, формирование карты локальной обстановки вокруг робота и построение глобальной карты окружающего пространства.













Напишите что вам нужно и получите предложения от проверенных поставщиков