

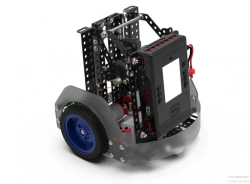
















Кибернетикии конструктор оид ба робототехникӣ имкон медиҳад, ки роботҳоро бо истифода аз технологияи пешрафта бо стандартҳои ҷаҳонӣ ҷамъоварӣ намоем, моделҳои гуногунро аз моделҳои оддии радиоконтролшаванда то системаҳои муосири кибернетикӣ созем. Набор барои муассисаҳои таълими иловагӣ пешбинӣ шудааст, аммо инчунин барои фаъолиятҳои берун аз синф ва дарсҳо ва гузаронидани курси «Асосҳои барномасозии роботҳо» мувофиқ аст.
Барои 1−2 хонанда пешбинӣ шудааст. Диски гардон ва осиёбҳо имкон медиҳанд, ки боркашро ҷамъоварӣ намоем.
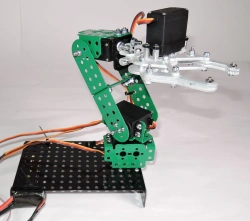
Дастгоҳ, серводвигателҳо ва қисмҳо барои ҷамъоварии зону метавонанд барои ҷамъоварии манипулятор истифода шаванд. Барои ҷамъоварии моделҳои мустақил дар маҷмӯъ батарея, ки бо зарядкунандаи он таъмин карда мешавад, пешбинӣ шудааст.
Синну сол 10+, аммо истифодаи маҳсулот бояд бо назорати калонсолон бо сабаби мавҷудияти элементҳои электрӣ бошад.












Tell us what you need and get quotes from verified suppliers