
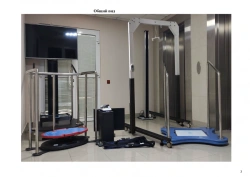
Специализированный тренажер с биологической обратной связью «Стэдис» позволяет выполнить оценку параметров ходьбы и провести реабилитацию, исходя из результатов обследования. Для регистрации параметров ходьбы в тренажере «Стэдис» используются биометрические сенсоры «Нейросенс».
Эти миниатюрные устройства устанавливаются на голени (и/или спину) пациента и регистрируют скорости вращений и ускорения по трем осям, а также электромиограмму по двум каналам. В сумме можно зарегистрировать до 20 параметров ходьбы.
Сенсоры беспроводные, питаются от аккумулятора и передают данные в программу посредством сети Wi-Fi. На их работу никак не влияют находящиеся рядом металлические конструкции.
Тренажер для оценки и восстановления функции ходьбы с биологической обратной связью позволяет осуществлять объективную оценку функции ходьбы с помощью биометрических сенсоров и ее восстановление посредством метода биологической обратной связи. Обучение правильной ходьбе происходит в увлекательных игровых средах.

















Напишите что вам нужно и получите предложения от проверенных поставщиков