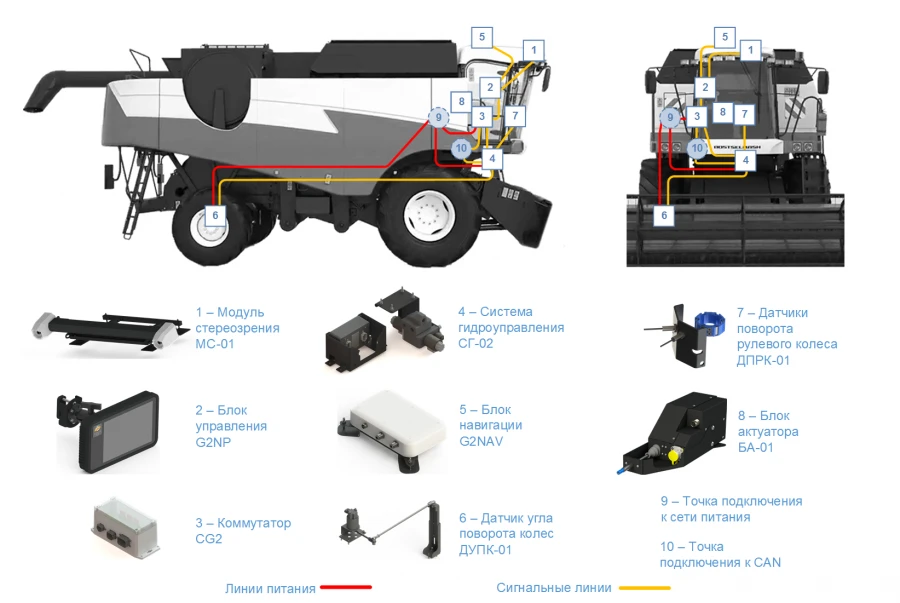
Система предназначена для реализации функции автовождения на зерноуборочных комбайнах при выполнении полевых работ по уборке урожая. Принцип работы системы основан на использовании технологии технического зрения с применением нейронных сегментирующих и детектирующих сетей.
В блок управления поступает информация с модуля стереозрения, модуля навигации, датчика угла поворота колес, датчика поворота рулевого колеса, а также информация о текущей скорости комбайна из CAN-шины. По видеоизображению нейронные сети выстраивают цифровую модель, в которой определяют объекты реального мира.
Программный комплекс совмещает полученную модель с данными от датчиков в режиме реального времени и выдаёт команды на подруливание и управление скоростью. Команды на подруливание поступают в блок управления гидроблоком, который осуществляет управление гидроблоком.
Гидроблок подключен к штатному насосу-дозатору, который выполняет поворот колес. В системе реализована функция передачи данных по каналу связи GSM.

















Напишите что вам нужно и получите предложения от проверенных поставщиков