




















































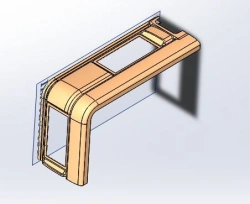


































































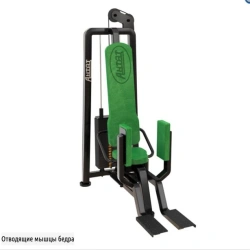


























The rehabilitation suspension for verticalisation of the patient "Orthorent", designed to lift and support the patient for the purpose of transfer or training with adjustable load on the lower limbs.
The suspension can be used for rehabilitation after injuries, for rehabilitation after strokes, for joint diseases of the limbs and for diseases accompanied by muscle weakness and movement coordination disorders.
Scope of application: in the conditions of medical and preventive institutions: in the conditions of gymnastic and rehabilitation halls, rooms for LFK and AFK; as well as at home..



















Tell us what you need and get quotes from verified suppliers